Notes to a video lecture on http://www.unizor.com
Partial Derivatives - Definition
A concept of partial derivative is applicable to functions of two and more arguments (we will consider it only for functions of two arguments) and is based on a concept of a derivative of a function of one argument that we are familiar with.
Graphically, a function of two arguments z=f(x,y) can be represented as a surface in a three-dimensional space.
If we fix one of the arguments, for instance, x=a, and consider our function for all values of the other argument y, while the fixed argument does not change its value, we will obtain a function of one argument f(a,y).
Similarly, if we fix another argument, y=b, and consider our function for all values of x, while the fixed argument y does not change its value, we will also obtain a function of one argument f(x,b).
Graphically, we can see this function of one argument if we cut the graph of the original function z=f(x,y) by a plane x=a (or a plane y=b) and consider their intersection as a graph of this new function of one argument within plane x=a (or a plane y=b).
Here is an illustration of cutting a graph of a function of two arguments with a plane where x is fixed or by a plane where y is fixed:
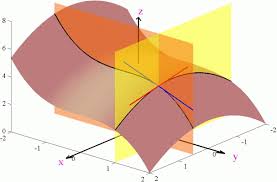
For any real a we can analyze the behavior of function of one argument f(a,y), using familiar apparatus of differential calculus. For example, we can find points of maximum, minimum or inflection, intervals of increasing or decreasing etc.
In particular, we can find a derivative of this function, which is called a partial derivative of function z=f(x,y) by y.
In our description it depends on constant a (or a might get canceled in the process of differentiation as a constant, but this is irrelevant).
For example, function
Function f(x,y)=x²·y³ for x=a looks like a²·y³ (where a is constant) and it has a partial derivative by y equal to a²·3y²=3a²y².
Traditionally, when talking about partial derivatives, we don't emphasize that one of the variables takes some special value (in our example, x=a), just that it is fixed, while we take a derivative by another variables. So, we don't substitute x=a before taking a partial derivative, we just assume that x (or y) is constant and then take a derivative by a variable that is not fixed.
So, for
For f(x,y)=x²·y³ the partial derivative by y (assuming x is constant) is 3x²·y² and partial derivative by x (assuming y is constant) is 2x·y³.
We will also use symbols ∂/∂x and ∂/∂y to signify partial derivatives by x (keeping y fixed) and by y (keeping x fixed), correspondingly.
So, for function z=x²+y² we can write
∂z/∂x = 2x (y is considered constant)
∂z/∂y = 2y (x is considered constant)
For function z=x²·y³; we can write
∂z/∂x = 2x·y³ (y is considered constant)
∂z/∂y = 3x²·y² (x is considered constant)
Two important notes about this process of partial differentiation.
Note 1
After taking a partial derivative by any argument we obtain a function that can be partially differentiated again by any argument.
Thus, we can talk about partially differentiating twice by x or twice by y, or once by x and then by y, or once by y and then by x (order is important).
Using the symbolics suggested above and self explanatorily expanding it to derivatives of higher order, we can write:
∂²/∂x²(x²·y³) =
= ∂/∂x(∂/∂x (x²·y³)) =
= ∂/∂x (2x·y³) = 2y³
∂²/∂y²(x²·y³) =
= ∂/∂y(∂/∂y (x²·y³)) =
= ∂/∂y (3x²·y²) = 6x²·y
∂²/∂x∂y(x²·y³) =
= ∂/∂x(∂/∂y (x²·y³)) =
= ∂/∂x (3x²·y²) = 6x·y²
∂²/∂y∂x(x²·y³) =
= ∂/∂y(∂/∂x (x²·y³)) =
= ∂/∂y (2x·y³) = 6x·y²
The fact that two mixed partial derivatives (first by x then by y or first by y then by x) are the same in the above example is not a coincidence. There is a theorem that states that for a broad range of functions they are supposed to be the same. This will be addressed later.
Note 2
We can expand this definition of partial derivative to functions of any number of arguments. In all these cases we just have to assume that, partially differentiating by one argument, we assume all the others are constant.
For examples,
∂/∂x(x²+x·y) = 2x+y
