Notes to a video lecture on http://www.unizor.com
Solar Energy → Electricity
Solar panels that produce electricity are not physically or chemically changed during this process. So, the only source of energy is the light, and the energy it carries is transformed by a solar panel into electricity, that is into movement of electrons.
In this lecture we will analyze how the energy of light forces the electrons to move.
The complete theory behind this process is based on principles of quantum mechanics and we will not be able to dive deep into this area, but a schematic description of the process will be presented.
Commercial solar panel are much more complex that might seem from the following explanation, but their engineering is not a subject of this lecture, which is only about the principle of generation of electricity from sun light.
Let's start with the most important component of a solar cell - silicon (Si).
Silicon is a metalloid, it has crystalline structure and its atoms have four valence electrons on the outer most orbit, next down orbit contains eight electrons and the inner most - two electrons.
Silicon is one of the most frequently occurring elements on Earth and, together with oxygen, forms molecules of silicon dioxide SiO2 - main component of sand.
All silicon atoms are neutral since the number of electrons in each one and the number of protons in each nucleus are the same and equal to 14.
Atoms are connected by their covalent bonds of valence electrons on the outer orbits into a lattice-like crystalline structure.
Picture below represents the crystalline structure of silicon
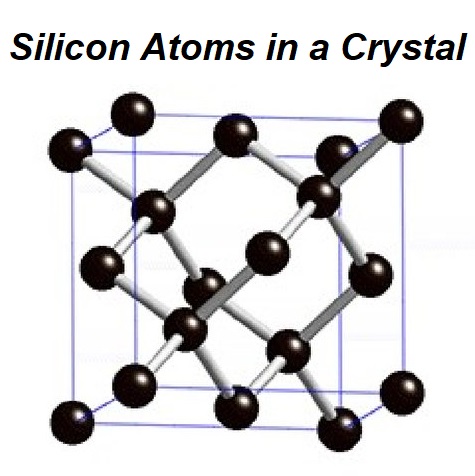
For the purposes of this lecture we will represent inner structure of silicon atoms with only outer orbit of each atom with four valence electrons, as electrons on the inner orbits do not participate in the process of generating electricity from light.
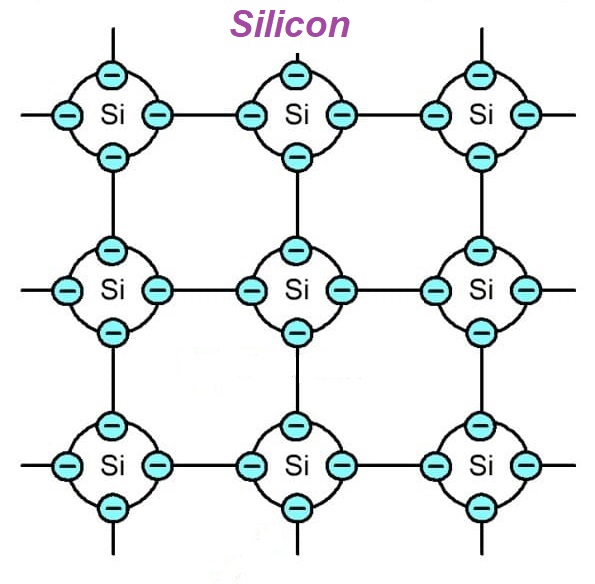
The covalent bonds are quite strong, they do not easily release electrons. As a result, under normal conditions silicon is practically a dielectric.
However, if we excite the electrons sufficiently enough to break the covalent bonds, some electrons will move. For example, if we increase the temperature of a piece of silicon or put it under a bright sun light and measure its electrical resistance, we will observe the resistance diminishing.
That's why silicon and similar elements are called semiconductors.
While excited electrons of any semiconductor decrease its electrical resistance, they don't produce electromotive force because the material as a whole remains electrically neutral.
To build a solar cell that produces electricity under sun light we will introduce two kinds of "impurities" into crystalline lattice of silicon.
One is an element with five valence electrons on the outer most orbit, like phosphorus (P). When it's embedded into a crystalline lattice of silicon, one electron on that outer orbit of phosphorus would remain not attached to any neighboring atom through a covalent bond.
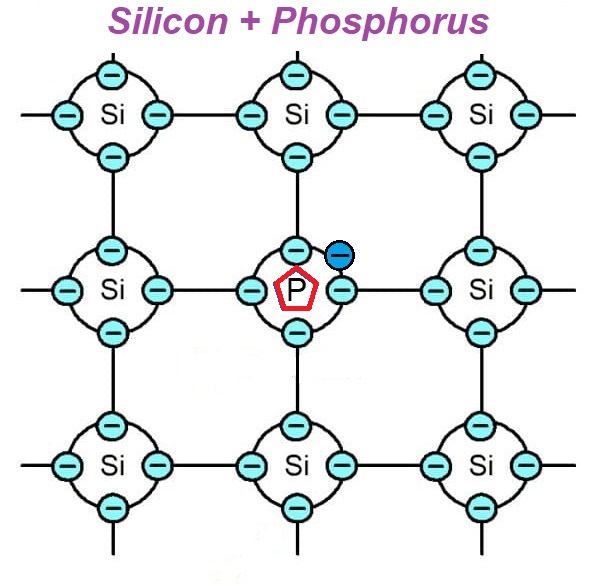
This creates the possibility for this electron to start traveling, replacing other electrons and pushing them out, which are, in turn, push out others etc. Basically, we create as many freelance electrons as many atoms of phosphorus we add to silicon base.
The whole material is still neutral, but it has certain number of freelance electrons and the same number of stationary positive ions - those nuclei of phosphorus that lost electrons to freelancers.
Silicon with such addition is called n-type (letter n for negative).
Another type of "impurity" that we will add to silicon is an element with three valence electrons on the outer orbit, like boron (B).
When atoms of boron are embedded into a crystalline lattice of silicon, the overall structure of this combination looks like this
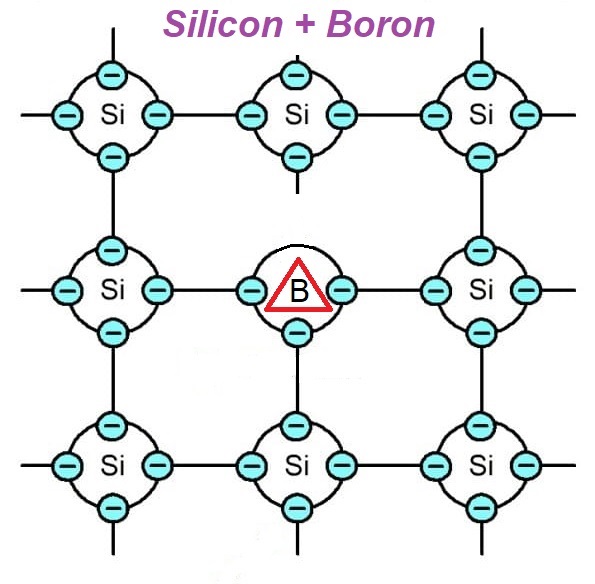
In this case the lattice has a deficiency of an electron that is traditionally called a "hole". Existence of a "hole" opens the opportunity for neighboring valence electrons to fill it, thus creating a "hole" in another spot. These "holes" behave like positively charged particles traveling inside silicon with added boron inasmuch as negatively charged electrons travel in silicon with added phosphorus.
Silicon with such addition of boron is called p-type (letter p for positive).
Now imagine two types of "impure" silicon, n-type and p-type, contacting each other. In practice, it's two flat pieces (like very thin squares) on top of each other.
Let's examine what happens in a thin layer of border between these different types of material.
Initially, both pieces of material are electrically neutral with n-type having free traveling electrons and equal number of stationary positive nuclei of phosphorus inside a crystalline structure and with p-type having traveling "holes" and equal number of stationary negative nuclei of silicon inside a crystalline structure.
As soon as contact between these two types of material is established, certain exchange between electrons of the n-type material and "holes" of the p-type takes place in the border region called p-n junction. Electrons and "holes" in this border region combine, thus reconstituting the lattice.
This process is called recombination.
The consequence of this process of recombination is that n-type material near the border loses electrons, thus becoming positively charged, while the p-type gains the electrons, that is loses "holes", thus becoming negatively charged.
Eventually, the diffusion between n-type and p-type materials stops because negative charge of the p-type sufficiently repels electrons from the n-type. There will be some equilibrium between both parts.
If we introduce heat or bright sun light to electrons of n-type part, the diffusion will be longer and greater charge will be accumulated on both sides of the material - positive on the n-type and negative on the p-type.
Now the key point is to connect n-type side to p-type through some kind of electrical connection and extra electrons from the p_type will go to positively charged n-type, thus creating an electric current. This current is weak because only the diffusion between n-type and p-type in the border region is a contributing factor, but it's still the electric current.
Obviously, the more excited electrons in the n-type material are - the stronger diffusion inside the p-n junction is and the stronger current is produced. That's why, if sun light is used to excite the electrons, the more light falls on the n-type side - the stronger current is produced.
A pair of n-type and p-type materials form a cell. Since we are talking about using sun light to excite electrons, these cells are called solar cells or photovoltaic cells. Cells can be connected in a series increasing the produced electromotive force (voltage) or they can be connected in parallel to increase the electric current (amperage). Solar panels are sets of solar cells connected in series to increase the generated electromotive force (voltage).
Materials used to produce commercial solar cells can be different, not necessarily silicon with phosphorus or boron additions, but the main principle of using p-n junction between superconductors is the same for all.