Postulates of Theory of Relativity
Historically, many concepts, considered absolute, turned out to be relative. For example, when the Earth was considered flat, a concept of vertical was absolute.
When it was discovered that the Earth looks like a sphere, it was understood that a concept of vertical depends on and is related to where you are standing on the surface of Earth.
Nicolaus Copernicus declared that our position in space is not any more special than any other position, it's not absolute, it's not the center of the Universe.
What's important is just our position relative to positions of other objects.
Galileo Galilei declared that the movement of an object is not absolute, but is relative to other objects' movement.
If object A moves relative to object B in some direction, object B at the same time moves relative to object A in the opposite direction.
Theory of Relativity, as many other scientific theories, is based on certain principles that we accept as the basis for further development of a theory.
Obviously, all these might change with time, so what we accept today might be different in the future.
The first principle we accept in the Theory of Relativity is based on comparing the laws of movements in two inertial physical systems with no external to these systems forces involved, when one system moves relatively to the other in a uniform motion along a straight line.
Defining a system of Cartesian coordinates and clock to measure time in each such system allows to express these laws of movement quantitatively as some equations.
The First Postulate of the Theory of Relativity is that all such laws and equations must be identical in these two inertial systems.
There can be no physical experiment that would allow to distinguish one such system from another.
The First Postulate is usually referred to as the Principle of Relativity.
Consequently, if all the laws are the same in these two systems, there is no such notion as absolute rest, because for any such system α there is always another system β uniformly moving relatively to it and, therefore, α is moving relatively to β.
It should be mentioned that the Principle of Relativity does not contradict our intuitive understanding of Nature, and we sometimes experience it in real life. For example, when sitting on a train watching another train slowly passing by, we might not realize for sure which train is moving and which is standing.
The Second Postulate of Theory of Relativity is not as obvious.
Moreover, to establish its validity, numerous very precise experiments were made until, finally, physicists agreed on it.
This principle is related to speed of light and needs a lot of explanation and justification.
First of all, according to Maxwell equations for electromagnetic field, the speed of light should depend only on the properties of the medium. In empty space this speed is about 300,000,000 meters per second, in air it is slightly less, in glass - much less.
What's interesting, when a ray of light goes from one medium to another, like from air to glass, its speed is reduced. But, when it comes out from glass back to air, its speed increases again to air-specific higher speed.
This is not like some material objects going through some obstacle, losing their speed and not recovering it anymore.
Secondly, according to very precise experimental data, the speed of light does not depend on the movement of its source.
Since all inertial systems are moving relatively to each other, the speed of light is the same in all inertial systems.
This is the Second Postulate of Theory of Relativity and this is what differentiates the Theory of Relativity from classical Physics.
Being confirmed many times, the invariance of the speed of light in empty space relative to movement of the light source was accepted by physicists, but no reasonable theoretical explanation for this counterintuitive property of light was offered until Albert Einstein suggested it in his famous article "ON THE ELECTRODYNAMICS OF MOVING BODIES" in 1905.
Einstein suggested that space and time have properties which escaped the attention of physicists working with lower speeds of movement of material objects.
If considered from the classical Physics' viewpoint on space and time, the constant speed of light, apparently, contradicts the Principle of Relativity.
To demonstrate this, consider such an experiment.
You are in the middle of a uniformly moving on rails platform and throw a ball either forward along the movement of a platform or backward, checking the time it takes for a ball to reach a front or back of a platform.
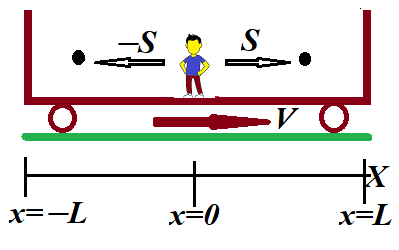
Assume the length from you to both edges of a platform is L, the constant speed of a platform relative to rails is V and the speed you throw a ball relative to rails is S.
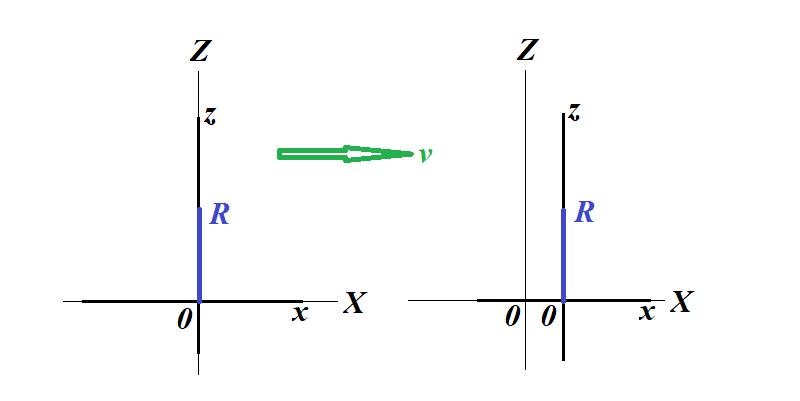
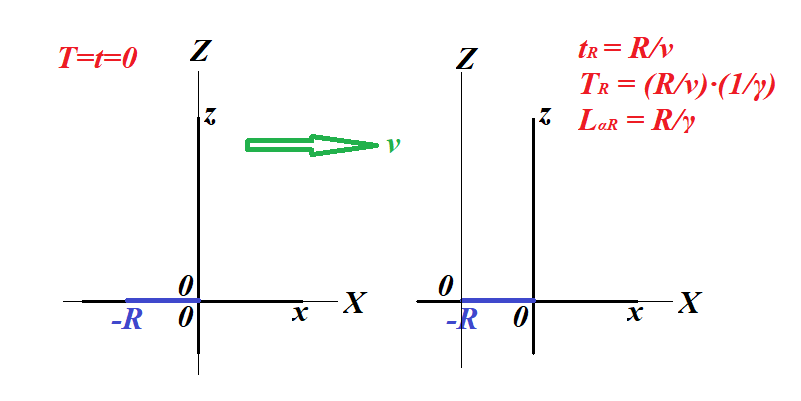
Set an X-axis parallel to the movement of a platform with a center of a platform to be at X=0 coordinate.
Then at time T=0 the coordinate of the front edge of a platform is X=L, the back edge is at X=−L.
A ball flying forward has a speed V+S, the one flying backward has speed V−S.
If the time a ball reaches the front of a platform is Tfront, the ball should cover a distance of L plus the distance a platform moves during time Tfront. All this time a ball moves with speed V+S.
Therefore, the coordinate of a ball at time Tfront is
X=(V+S)·Tfront
Coordinate of the front edge of a platform at the same moment is X=L+V·Tfront.
Since at time Tfront a ball reaches the front edge of a platform, their X-coordinates are the same, which leads us an equation
(V+S)·Tfront = L + V·Tfront
Hence, Tfront = L/S
This corresponds to Principle of Relativity because the same result would be, if the platform was not moving relative to rails.
A ball flying backward has a speed V−S.
If the time a ball reaches the front of a platform is Tback, the ball should cover a distance of L minus the distance a platform moves during time Tback. All this time a ball moves with speed V−S.
Therefore, the coordinate of a ball at time Tback is
X=(V−S)·Tback
Coordinate of the back edge of a platform at the same moment is X=−L+V·Tback.
Since at time Tback a ball reaches the back edge of a platform, their X-coordinates are the same, which leads us an equation
(V−S)·Tback = −L + V·Tback
Hence, Tback = L/S
This also corresponds to Principle of Relativity because the same result would be, if the platform was not moving relative to rails.
As we see, this classical approach leads to correct results in full agreement with the Principle of Relativity.
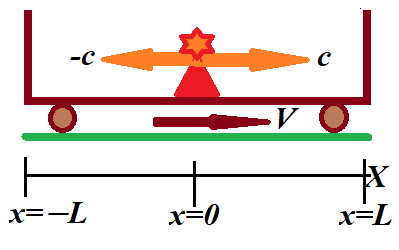
But let's repeat the same experiment with a ray of light instead of a ball. The light moves with constant speed c towards positive direction of X-axis and −c towards negative direction of X-axis regardless of the speed of its source.
Therefore, in our two equations for time we have to replace the speed of a ball V+S and V−S with the speed of light c and −c, which leads to these equations
c·Tfront = L + V·Tfront
−c·Tback = −L + V·Tback
from which follows
Tfront = L/(c−V)
Tback = L/(c+V)
Clearly, these two values of time are different, unless a platform is not moving and V=0. The results of our experiment will depend on the speed of a platform.
Therefore, being inside an inertial system, a platform, conducting an experiment with rays of light, we can distinguish between moving platform and platform at rest or two platforms moving with different speeds, which contradicts the Principle of Relativity.
The main achievement of Special Theory of Relativity by Einstein was to offer a model of space and time and their transformation from one inertial system to another that restored the compliance with the Principle of Relativity for systems that involve the light and retained the classical view on them as an approximation, when the speeds of participating objects are not too high.
Based on the First and the Second Postulates, the relativistic laws of transformation of space and time were logically derived by Einstein and confirmed later on by numerous very precise experiments.
While the relativity of space (position and movement) was accepted by physicists since the times of Galileo, the relativity of time was needed to bring the results of experiments with rays of light in compliance with the Principle of Relativity.
Summary
The First Postulate of the Theory of Relativity is that all Physical laws and equations must be identical in all inertial systems
- the Principle of Relativity
The Second Postulate of the Theory of Relativity is that the speed of light is the same in all inertial systems depending only on the medium where light propagates