Unizor is a site where students can learn the high school math (and in the future some other subjects) in a thorough and rigorous way. It allows parents to enroll their children in educational programs and to control the learning process.
One of the fundamental laws of Newtonian mechanics is the Second Law describing the relationship between a vector of forceF, inertial massm and a vector of accelerationa F = m·a
where inertial massm is considered a constant characteristic of an object independent of time, space or motion.
Since a vector of acceleration a, by definition, is the first derivative of a vector of speedu by timet, the same law can be written as F = m·du/dt = d(m·u)/dt
The product of mass and a vector of speed is a vector of momentum of motion p=m·u, so the same Second Law can be written as F = dp/dt
As we know from the previous lecture, the relativistic momentum differs from the Newtonian one by Lorentz factor γ and, assuming the movement of an object of the rest mass m0 is one-dimensional along X-axis with, generally speaking, variable speed u(t), the relativistic momentum at any moment of time t can be expressed as
p(t) = γ·m0·u(t) =
m0·u(t)
√1−u²(t)/c²
Therefore, we can express the relativistic force F as
F(t) =
d
dt
m0·u(t)
√1−u²(t)/c²
During an infinitesimal time period from t to t+dt an object will move along X-axis by distance dx = u(t)·dt.
The force will perform work during this interval dW(t) = F(t)·dx = F(t)·u(t)·dt
This work will increase an object's kinetic energy.
Let's assume that at time t=0 our object is at rest, that is u(0)=0.
During the period from t=0 to t=T the force F(t) is acting on this object, so its speed is changing from 0 to some ending value u(T).
The total kinetic energy K[0,T] gained by an object during a time interval from t=0 to t=T as a result of acting force F(t) can be obtained by integrating the work increment dW(t) by time t on an interval [0,T].
K = ∫[
d
dt
m0·u(t)
√1−u²(t)/c²
]·u(t)·dt
(assumed integration is on an interval from t=0 to t=T).
Let's use the formula for integration by parts ∫0T f '·g = f·g|0T − ∫0T f·g'
where
f =
m0·u(t)
√1−u²(t)/c²
and g = u(t)
Then the f·g is equal to
f·g =
m0·u(t)
√1−u²(t)/c²
· u(t) |
T
0
=
=
m0·u²(T)
√1−u²(T)/c²
The ∫0T f·g' would be equal to
∫0T f·g' = ∫
m0·u(t)
√1−u²(t)/c²
·u'(t)·dt
(assumed integration is on an interval from t=0 to t=T).
Since u'(t)·dt = du(t), we can use variable u as an independent variable and integrate by it on an interval from u=u(0)=0 to u=u(T)
Our latter integral equals then
Now we can calculate the full expression K = ∫0T f '·g = f·g|0T − ∫0T f·g' =
=
m0·u²(T)
√1−u²(T)/c²
−
−
−m0·c²·[1−u²(T)/c²]
√1−u²(T)/c²
− m0·c²
Notice that two fractions in the above expression have a common denominator, so their numerators can be added together and significantly simplified with everything except m0·c² canceling out.
Therefore, relativistic kinetic energy accumulated by an object during the time T equals to
K(T) =
m0·c²
√1−u²(T)/c²
− m0·c²
Since the time T can have any value, and u(T) is the final speed at this moment, we can drop T and consider kinetic energy at any moment in time as a function of speed u at this moment
K(u) =
m0·c²
√1−u²/c²
− m0·c² =
= m0·c²(γ−1)
where
γ =
1
√1−u²/c²
is a familiar Lorentz factor.
Obviously, it's interesting to see the relationship between relativistic kinetic energy and classical definition K=½m·u².
To establish this connection, we assume that the object's speed u is small compared to the speed of light c and can approximate Lorentz factor γ with the first few members of its Taylor series.
As is well known, Taylor series for 1/√1−x² is 1+x²/2+3x4/8+5x6/16+...
Using it with x=u/c and ignoring members with x4 and higher degrees, we will get approximate value of relativistic kinetic energy K ≅ m0·c²·[1+(u/c)²/2−1] =
= ½m0·u²
which exactly corresponds to a classical definition of kinetic energy.
One of the fundamental laws of Newtonian mechanics is the Second Law describing the relationship between a vector of forceF, inertial massm and a vector of accelerationa F = m·a
where inertial massm is considered a constant characteristic of an object independent of time, space or motion.
Since a vector of acceleration a, by definition, is the first derivative of a vector of speedv by timet, the same law can be written as F = m·dv/dt = d(m·v)/dt
The product of mass and a vector of speed is a vector of momentum of motion p=m·v, so the same Second Law can be written as F = dp/dt
The Conservation Law of Momentum, based on uniformity of space, states that the conservation of momentum is universal and should be maintained through transformation from one inertial frame to another (see the previous lecture Noether Theorem in this course).
That's why it makes sense to consider the latter expression of the Newton's Second Law in terms of a derivative of the momentum of motion as the most appropriate form.
It makes sense to discuss the physical meaning of a momentum and its expression as a product of mass and velocity.
As seen from the last formula, a force is a rate of change of a momentum. The greater the change of momentum - the greater force that caused its change.
From another perspective, the momentum can be viewed as a degree of resistance to the change of motion.
Consider an object uniformly moving along a straight line and some external force that tries to change this motion.
It is intuitively acceptable that an object with greater mass resists the changes to its movement stronger and, therefore, requires stronger force to achieve similar change in motion.
Similarly, the faster an object moves - the more difficult to change its trajectory, and we can reasonably assume that an object with higher speed of movement requires stronger force to changes its movement.
The purpose of this lecture is to analyze the transformation of momentum from one inertial frame to another using the Law of Conservation of Momentum as a tool.
We do know how relativistic speed is transformed (see lectures Einstein View - Adding X-Velocitis and Einstein View - Adding Y-,Z-Velocitis in this course).
The Law of Conservation of Momentum will help us to determine how an object's momentum changes when viewed from different reference frames.
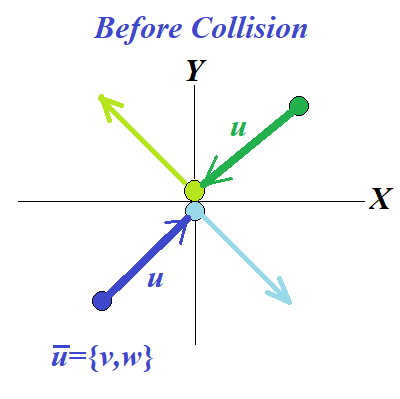
Let's analyze the ideal elastic collision of two identical spherical objects as shown on the following pictures describing this collision in the reference frame β{x,y,z,t} at rest relative to the point of collision (the origin of coordinates) and positioned symmetrically to the objects.
Assume, the spherical blue and green objects are uniformly moving on parallel trajectories in opposite directions with the same by magnitude velocity u={±v,±w}, so their ideally elastic collision occurs at a point on the x-axis when both spheres are tangent to this axis.
This assures the mirror-like trajectories before and after the collision.
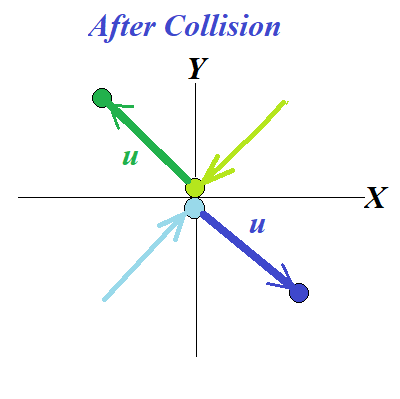
Summary of x,y-components (v,w) of velocity vectors u for both objects before and after the collision can be presented in the following table
Object
Before (x,y)
After (x,y)
Green
(−v,−w)
(−v,w)
Blue
(v,w)
(v,−w)
Since in the β-frame both objects have the same mass and speed magnitude and move in the opposite directions before and after the collision, the total momentum of both should be zero before and after the collision. The Law of Conservation of Momentum is held.
Obviously, the Law of Conservation of Momentum as a vector must be held separately for its X- and Y-components.
Let's now switch to another reference frame and apply the Law of Conservation of total Momentum of both objects.
Consider an inertial reference frame α{X,Y,Z,T}.
Assume that β-frame {x,y,z,t} is uniformly moving along the X-axis of this α-frame with some constant speed s maintaining parallelism and directionality of all axes, and at some initial time both frames coincide.
Recall the laws of relativistic addition of velocities presented earlier in the lecture Adding Y-, Z-Velocities within Einstein View part of this course
uαx =
s + uβx
1 + s·uβx /c²
uαy =
uβy·√1−(s/c)²
1+s·uβx /c²
Let's calculate the X- and Y-components of both green and blue objects in α-frame before and after the collision.
1. The horizontal x-component of the green object's velocity in β-frame is, as we stated above, uβx=−vbefore and after the collision.
Therefore, in α-frame before and after the collision its X-component is
uαx =
s + (−v)
1 + s·(−v)/c²
2. The value of vertical y-component of velocity of a green object in β-frame is, as we stated above, −wbefore the collision and wafter the collision.
Therefore, before the collision in α-frame, substituting uβy=−w and uβx=−v, the vertical component of the green object is
uαy =
(−w)·√1−s²/c²
1 + s·(−v)/c²
3. After the collision in α-frame, substituting uβy=w and uβx=−v, the vertical component of the green object is
uαy =
w·√1−s²/c²
1 + s·(−v)/c²
4. Let's examine the blue object now.
In the original β-frame its horizontal speed along x-axis is vbefore and after the collision, while its vertical speed along y-axis is wbefore and −wafter the collision.
Using the same formulas of adding velocities, the horizontal speed of the blue object in α-frame before and after the collision is
uαx =
s + v
1 + s·v/c²
5. The value of vertical component of velocity of a blue object in β-frame is, as we stated above, wbefore the collision and −wafter the collision.
Therefore, before the collision in α-frame, substituting uβy=w, the vertical component of the blue object is
uαy =
w·√1−s²/c²
1 + s·v/c²
6. After the collision in α-frame, substituting uβy=−w the vertical component of the blue object is
uαy =
−w·√1−s²/c²
1 + s·v/c²
Summary of velocities in α-frame:
Object
Speed
Value
Green
X before
s−v
1 − s·v/c²
Blue
X before
s+v
1 + s·v/c²
Green
X after
s−v
1 − s·v/c²
Blue
X after
s+v
1 + s·v/c²
Green
Y before
−w·√1−s²/c²
1 − s·v/c²
Blue
Y before
w·√1−s²/c²
1 + s·v/c²
Green
Y after
w·√1−s²/c²
1 − s·v/c²
Blue
Y after
−w·√1−s²/c²
1 + s·v/c²
Not surprisingly, the lengths² of velocity vectors, being the same in the β-frame for both objects lβ² = v² + w², is different in the α-frame.
Green object's velocity vector length² in α-frame (lα²) is
[(s−v)²+w²(1-s²/c²)] /(1−s·v/c²)²
Blue object's velocity vector length² in α-frame (lα²) is
[(s+v)²+w²(1-s²/c²)] /(1+s·v/c²)²
Newtonian momentum of an object of mass m moving in two-dimensional Euclidean inertial reference frame with some velocity vector u={v,w} is a vector m·u={m·v,m·w}.
The rules of addition of velocities when observing the movement from another inertial reference frame are simple vector addition derived from Galilean transformation of coordinates.
Since X-component of each object's velocity before and after a collision in α-frame are the same, the X-component of the total momentum of both objects, calculated according to classical Newtonian definition as a product of an object's mass by its velocity vector, would obviously be the same before and after the collision.
The situation is completely different along Y-axis.
If we try to check the law of conservation of momentum calculated according to classical Newtonian definition as mass times speed along each axis, we obtain the following results.
Before a collision the total Newtonian momentum of both green and blue objects along Y-axis is
−m·w·√1−s²/c²
1 − s·v/c²
+
m·w·√1−s²/c²
1 + s·v/c²
After a collision the total Newtonian momentum of both green and blue objects along Y-axis is
m·w·√1−s²/c²
1 − s·v/c²
+
−m·w·√1−s²/c²
1 + s·v/c²
The only cases when they are equal is if s·v=0 or w=0, that is either s=0, which means β-frame is not moving relative to α-frame or v=0, that is no horizontal movement, or w=0, that is no vertical movement.
Classical Newtonian definition of a momentum is not working in relativistic mechanics in general cases..
To address this problem, the relativistic momentum is defined differently than the classical Newtonian one.
Relativistic momentum of an object is its Newtonian-like momentum (product of mass and velocity vector) multiplied by factor γ=1/√1 − l²/c², where l is the magnitude (length) of a velocity vector.
Modified this way, the relativistic momentum is preserved in the collision we use as an example.
The step-by-step proof of the Law of Conservation of Relativistic Momentum can be viewed on page Proof of Conservation of Relativistic Momentum (there are a lot of formulas there, so open it in a new tab for clarity by right-click and choosing to open in a new tab).
Let's summarize our results.
Assume, in our reference frame two objects of mass m each are moving towards each other on a collision course. Their velocities have the same magnitude u and we assume ideal elastic collision between them.
We have proven the law of conservation of their total relativistic momentum in the course of their collision, where the relativistic momentum of each is calculated according to this formula
p = γ·m·|u| =
m·|u|
√1−|u|²/c²
The interpretation of the denominator in the expression for relativistic momentum is a matter of opinion.
Some physicists prefer considering the mass of an object as changing with the speed and call the expression γ·m = m/√1−|u|²/c²
a relativistic mass.
Some others prefer to relate the factor γ as applicable to an entire relativistic momentum, leaving mass unchanged and calling it a rest mass, emphasizing this by using a subscripted version m0
Let's complete our formulas for adding velocities with those related to Y- and Z-axis, while assuming that the movement of one reference frame relatively to another is along the X-axis.
Consider, as before, two inertial reference frames: α-frame with coordinates {X,Y,Z} and time T and β-frame with coordinates {x,y,z} and time t.
At time T=t=0 both reference frames coincide.
Assume that β-frame uniformly moves relatively to α-frame with speed v along α-frame's X-axis, maintaining parallelism of all corresponding axes.
Assume an object moves uniformly in β-frame along some direction with X-, Y- and Z-components of its velocity vector uβx, uβy and uβz correspondingly.
At time t=0 this object is at the origin of β-frame.
Our task is to determine the components uαx, uαy and uαz of the velocity of this object in α-frame, using Lorentz Transformation.
In the previous lecture we discussed the analogous task but restricted only to an object moving in the β-frame along X-axis.
This lecture is about a more general movement of the object along any direction.
Obviously, the formula derived in the previous lecture for a movement along X-axis is fully applicable to the X-component of the general velocity vector, and out task is restricted to add Y- and Z-components of the velocity vector.
We will use exactly the same methodology for Y- and Z-components as we used for X-component.
The object in β-frame moves according to this formulas for its coordinates x(t) = uβx·t y(t) = uβy·t z(t) = uβz·t
Our task is to find all the components of the velocity of an object in α-frame, that is to find uαx=dX/dT uαy=dY/dT uαz=dZ/dT
All calculations we did in the previous lecture, when motion of an abject was restricted to X-direction, are good for getting uαx, but we will repeat them here.
Using an explicit form of functions x(t), y(t) and z(t), the above formulas of Lorentz Transformation are
T =
t + v·uβx·t/c²
√1−(v/c)²
X =
uβx·t + v·t
√1−(v/c)²
Y =
uβy·t
Z =
uβz·t
Since dX/dt = (dX/dT)·(dT/dt),
we can express the uαx=dX/dT as uαx = dX/dT = (dX/dt)/(dT/dt)
and we can easily resolve our problem as follows dX/dt = (v+uβx )/√1−(v/c)² dT/dt = (1+v·uβx /c²)/√1−(v/c)²
Therefore, dX/dT = (v+uβx )/(1+v·uβ /c²)
The final formula for X-component of the object's velocity uαx in α-frame is
uαx =
v + uβx
1 + v·uβx /c²
Let's analyze the Y-component of the object's velocity.
Since dY/dt = (dY/dT)·(dT/dt),
we can express the uαy=dY/dT as uαy = dY/dT = (dY/dt)/(dT/dt)
and we can easily resolve our problem as follows dY/dt = dy/dt = uβy
As before, dT/dt = (1+v·uβx /c²)/√1−(v/c)²
Therefore,
uαy =
uβy·√1−(v/c)²
(1+v·uβx /c²)
In particular, if an object moves along y-axis in β-frame (uβx=0), its Y-axis speed in α-frame is uαy = uβy·√1−(v/c)²
The Z-component of the velocity is analogous to Y-component.
Since dZ/dt = (dZ/dT)·(dT/dt),
we can express the uαz=dZ/dT as uαz = dZ/dT = (dZ/dt)/(dT/dt)
and we can easily resolve our problem as follows dZ/dt = dz/dt = uβz
As before, dT/dt = (1+v·uβx /c²)/√1−(v/c)²
Therefore,
uαz =
uβz·√1−(v/c)²
(1+v·uβx /c²)
In particular, if an object moves along z-axis in β-frame (uβx=0), its Z-axis speed in α-frame is uαz = uβz·√1−(v/c)²
In this course we are trying to support every formula or a statement with a relatively rigorous proof, based on earlier proven properties and formulas.
This particular lecture is about an issue, which, on one hand, is extremely important for the theory, but, on the other hand, involves a significant mathematical effort that goes beyond the scope of this course.
So, the following is a theoretical item (Noether's Theorem) presented without a proof.
The Noether's Theorem was published in 1918 by Emmy Noether, a brilliant German mathematician, who was regarded by such scientists as Albert Einstein as the most important woman in the history of mathematics.
Her main contribution to Physics was to validate the only experimentally confirmed laws of conservation by a theoretical proof based on much more fundamental properties of the Universe.
We wish every statement to be based on some earlier proven statement or a theorem. Analyzing these earlier statements, we find them to be based on even earlier ones etc.
Inevitably, we would come to a statement that we have to take as an axiom without a proof.
Obviously, we would like to accept as axioms such statements that correspond to our general feelings about the Universe, seem to us as natural and not contradicting our intuition.
The laws of conservation of energy, linear momentum or angular momentum were widely accepted by physicists for centuries based on experimental data.
However, there was always a doubt whether these laws were indeed the universal laws of nature or just our not always perfect results of experiments.
The Nouther's Theorem actually stated that these laws of conservation are intimately related to properties of our space and time.
In particular, they are consequences of uniformity of our space and time.
Emmy Nouther took as an axiom some quite fundamental and well accepted statements that our time is uniform and totally symmetrical, our space is uniform and symmetrical, one direction in space is no different than another.
Based just on this uniformity and symmetry, she has proven the validity of our laws of conservation.
More precisely,
(a) if we accept the uniformity of time, the law of conservation of energy follows as a mathematical consequence;
(b) if we accept the linear uniformity of space, the law of conservation of linear momentum follows as a mathematical consequence;
(c) if we accept the directional uniformity of space, the law of conservation of angular momentum follows as a mathematical consequence.
There is no doubts that it's significantly easier and much more natural to accept the uniformity of time as an axiom than the law of conservation of energy, and, similarly, the rest of the prepositions of the Nouther's Theorem.
That's why this theoretical result is as fundamentally important for Physics as axioms of Euclid for Geometry.