Viscosity Damping 3
Underdamping
This lecture continues analyzing the damped oscillation in a case of underdamping. It relies on equations and symbols presented in the previous two lectures.
The main differential equation that describes the damped oscillation is
m·x"(t) + c·x'(t) + k·x(t) = 0
where
m is a mass of a object attached to a free end of a spring,
c is viscosity of environment surrounding a spring, as it acts against motion of an object,
k is elasticity of a spring,
x(t) is displacement of an object from its neutral position on a spring.
We also consider initial conditions
x(0) = a (initial stretch),
x'(0) = 0 (no initial speed).
In search of two partial solutions of the equation above we used a function
x(t) = eγ·t
where γ - some (generally, complex) number.
The reason for this is that, substituting this function with its first and second derivatives into the differential equation, we get
x'(t) = γ·eγ·t
x"(t) = γ²·eγ·t
and the differential equation is
γ²·m·eγ·t + γ·c·eγ·t + k·eγ·t = 0
Canceling eγ·t, which never equal to zero, we get a quadratic equation for γ
γ²·m + γ·c + k = 0
with any of its solutions (generally, complex), used in function eγ·t, delivering the partial solution of the original differential equation.
Case 3
Discriminant of this quadratic equation Δ=c²−4k·m is NEGATIVE
Let
ω² = −Δ /4m² = k/m − (c/(2m))²
where ω - some positive real number.
Then the solution to a quadratic equation for γ above is a set of two complex numbers
γ1,2 = −c/(2m) ± ω·i
where i²=−1 is an imaginary unit.
Two partial solutions of our differential equation in the domain of complex functions of real argument t are
x1(t) = e [−c/(2m)+ω·i]·t and
x2(t) = e [−c/(2m)−ω·i]·t
Recall the Euler's formula
ei·t = cos(t) + i·sin(t)
that you can find in the "Math 4 Teens" course on this site UNIZOR.COM - Math 4 Teens - Trigonometry - Complex Numbers and Trigonometry - Euler's Formula.
Using Euler's formula, we can split two partial solutions of our differential equation into real and imaginary parts:
x1(t) = x1.Re(t) + i·x1.Im(t)
where
x1.Re(t) = e−c·t/(2m)·cos(ω·t)
and
x1.Im(t) = e−c·t/(2m)·sin(ω·t)
Similarly,
x2(t) = x2.Re(t) + i·x2.Im(t)
where
x2.Re(t) = e−c·t/(2m)·cos(−ω·t) =
= e−c·t/(2m)·cos(ω·t)
and
x2.Im(t) = e−c·t/(2m)·sin(−ω·t) =
= e−c·t/(2m)·sin(ω·t)
If a complex function x(t) satisfies a linear differential equation, its real and imaginary parts must separately satisfy it as well. This obvious statement follows from the fact that, if a(t)+i·b(t)=0 for all t, then a(t)=0 and b(t)=0 for all t.
Therefore, if
x(t) = xRe(t) + i·xIm(t)
is a solution of our differential equation, then
xRe(t) and xIm(t)
are solutions in their own rights.
Therefore, we have two linearly independent real functions that are partial solutions to our differential equation:
x1(t) = e−c·t/(2m)·cos(ω·t)
x2(t) = e−c·t/(2m)·sin(ω·t)
Any linear combination of these two functions also is a solution to our differential equation.
This allows to express a general solution as
x(t) = e−c·t/(2m) ·
· [C1·cos(ω·t)+C2·sin(ω·t)]
The expression above for any C1 and C2 not simultaneously equal to zero can be simplified as follows.
Let φ be such an angle that
cos(φ) = C1 /√C1²+C2²
sin(φ) = C2 /√C1²+C2²
This angle can easily be constructed, it's an angle from the X-axis to a vector with endpoint at coordinates (C1,C2).
Then
x(t) = e−c·t/(2m)·√C1²+C2²·
· [cos(φ)·cos(ω·t) +
+ sin(φ)·sin(ω·t)] =
= e−c·t/(2m)·√C1²+C2² ·
· cos(ω·t−φ) =
= D·e−c·t/(2m)·cos(ω·t−φ)
where D=√C1²+C2² can be any positive real number not equal to zero.
This is a general solution of our differential equation in the case of negative discriminant Δ=c²−4m·k,
where
D - any positive constant
φ - any angle (phase shift)
ω= √−Δ /(2m).
Simple check confirms that this is a solution to our differential equation.
As we see, the motion is a combination of sinusoidal oscillation cos(ω·t−φ) and a damping factor D·e−c·t/(2m), which reduces the amplitude of oscillation, as the time goes by.
The amplitude of the oscillation is exponentially diminishing.
Let's determine constants D and φ from initial conditions on the position and speed of an object.
At t=0 the position is x(0)=a and speed is x'(0)=0.
x(t) = D·e−c·t/(2m)·cos(ω·t−φ)
x'(t) = −D·e−c·t/(2m) ·
· [ω·sin(ω·t−φ) +
+ (c/(2m))·cos(ω·t−φ)]
From this for t=0 follows
D·cos(−φ) = a
−D·[ω·sin(−φ) +
+ (c/(2m))·cos(−φ)] = 0
or
D·cos(φ) = a
D·[−ω·sin(φ) +
+ (c/(2m))·cos(φ)] = 0
or
D·cos(φ) = a
−D·ω·sin(φ) + c·a/(2m) = 0
or
D·cos(φ) = a
D·sin(φ) = c·a/(2m·ω)
From these we can obtain
D² = a²·[1+c²/(4m²·ω²)]
D = a·√1+c²/(4m²·ω²)
For phase φ we can find
cos(φ) =
= 1/√1+c²/(4m²·ω²)
sin(φ) =
= c/[2m·ω·√1+c²/(4m²·ω²)]
Let's calculate the exact expression for this function for some sample values of the constants involved:
a=√3
m=1
c=2
k=4
Δ=c²−4m·k=−12
ω²=−(c/(2m))²+k/m=3
D=a·√1+c²/(4m²·ω²)=2
cos(φ)=
=1/√1+c²/(4m²·ω²)=√3/2
sin(φ)=
=c/2m·ω·√1+c²/(4m²·ω²)=1/2
φ=π/6
Finally, the equation that describes an object's motion
x(t) = D·e−c·t/(2m)·cos(ω·t−φ)=
= 2·e−t·cos(√3·t−π/6)
Let's draw a graph of our sample function
x(t) = 2·e−t·cos(√3·t−π/6)
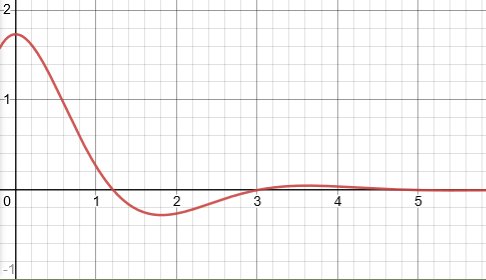
This graph confirms that the real oscillation does take place in case Δ=c²−4k·m is NEGATIVE, but its amplitude is exponentially diminishes due to damping effect.
The effect of damping of viscous environment is not strong enough to completely suppress the back and forth movement of an object on a spring, but sufficient to make these oscillation less and less significant.
This is called underdamping or small damping.

No comments:
Post a Comment