Rope Energy
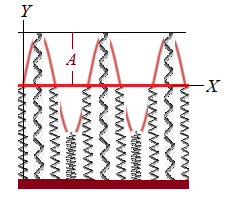
Assume that we have a rope stretched along the X-axis (horizontally).
Its end (x=0) is forcefully oscillated up and down according to a formula D(t)=A·cos(ω·t).
This causes a rope's piece positioned at distance x from the forcefully oscillated end (x=0) to perform harmonic up and down oscillations along the Y-axis (vertically) according to a formula
y(x,t) = A·cos(ω·t−k·x)
where
y(x,t) is vertical deviation of the rope's piece at distance x from the source of oscillations as a function of time t,
A is an amplitude of oscillations along the Y-axis,
ω is an angular speed of oscillations,
t is time,
k is a rope's characteristic.
The physical meaning of k will be clear, if the formula for oscillations at distance x from the rope's end is presented as y=A·cos(ω·(t−x/v)), where v is a speed of wave propagation along a rope and, therefore, x/v is a time delay between oscillations at their origin x=0 and oscillations at distance x from the origin.
Then we can construct different relations between
parameter k,
speed of wave propagation v,
period of oscillation τ,
frequency of oscillations f and
wavelength λ
as follows:
k = ω/v
v = λ/τ
τ = 1/f
v = λ·f
2π·f = ω
k = ω/v = ω/(λ·f) = 2π/λ
Previous lecture was about modeling the oscillations of a horizontally stretched rope with oscillations of an infinite number of vertically oriented tiny springs, each attached to an independent infinitesimal piece of a rope.
The characteristics of this approach to model rope's oscillations are as follows:
1. Mass attached to each tiny spring equals to dm=μ·dx.
2. Location of each tiny spring is x - its distance from the rope's end.
3. All springs have the same elasticity ke=ω²·μ·dx
4. All springs are initially stretched by A, so their amplitude will be the same as that of the rope.
5. All springs will have the same angular speed ω, the same as waves on a rope.
6. After initial stretch the springs will be let go, but not simultaneously; the time delay of a spring at distance x from the beginning will correspond to time needed for a wave on a rope to reach that distance, that is the time delay will be equal to x/v=x/(λ·f)=2π·x/(λ·ω).
7. As a result, a spring at distance x from the beginning oscillates according to a formula
y(x,t) = A·cos(ω·t−k·x) =
= A·cos[ω·(t−2π·x/(λ·ω))]
where k = 2π/λ
Modeled as described above, rope oscillations are identical to oscillations of all those tiny springs. The point-masses at the top of these springs will oscillate exactly the same as if they are attached to a rope.
The above characteristics of the springs, that we have used to model the propagating waves on a rope, are sufficient to analyze the distribution of energy, using what we have already analyzed about springs.
Our task is to find what energy is carried by one single wave of a rope. For this we will calculate the energy carried by a single tiny spring that models oscillations of an infinitesimal piece of a rope dx and integrate it along the wavelength of oscillations λ.
For this purpose we consider the tiny springs along the X-axis within any segment of the length λ, for example, from x=0 to x=λ.
Each individual tiny spring at fixed X-coordinate x carries potential and kinetic energies, and these energies are changing with the time, that is they are functions of time for each fixed spring at distance x from origin.
Consider a potential energy of an individual tiny single spring U(x,t) for any fixed x as a function of time t.
This potential energy depends only on its vertical deviation y(x,t) which determines the degree of a stretch.
Earlier we derived a formula for potential energy of a spring with elasticity ke stretched by d from a neutral position as ½ke·d².
In our case distance a spring is stretched is d=y(x,t).
The elasticity coefficient was derived above as a function of required angular speed ω of oscillations for a particular mass dm=μ·dx attached to a spring: ke=ω²·μ·dx.
So, the potential energy of a spring at distance x from the origin of oscillations at time t is
U(x,t) = ½ke·y²(x,t) =
= ½ω²·μ·dx·A²·cos²(ω·t−k·x),
where k = 2π/λ.
For each moment in time t (that is, t is fixed and participates in the integration by x as a constant) the potential energy of all springs within a segment [0,λ] of a distance from the origin of oscillation is a definite integral of the above expression by x from x=0 to x=λ.
Let's find integral
I = ∫0λcos²(ω·t−k·x)dx,
where k = 2π/λ, and multiply the result by a constant ½ω²·μ·A².
To calculate I, we substitute
z = ω·t−k·x
dz = −k·dx
dx = −dz/k
We have to express the limits of integration in terms of z:
if x=0, z=ω·t
if x=λ, z=ω·t−k·λ=ω·t−2π
Now our integral looks like
I = −∫0λcos²(z)dz/k
Calculating the indefinite integral
∫cos²(z)·dz = ½z + ¼sin(2z) + C
Using Newton-Leibnitz formula for definite integral, we have to substitute upper limit for z, then lower limit and subtract the latter from the former:
½(ω·t−2π)+¼sin(2·(ω·t−2π)) −
− ½ω·t−¼sin(2ω·t) = −π
Note, this integral is independent of time t. It means that combined potential energy of all tiny springs on a segment of the length λ does not change with time, as one spring is stretched or squeezed more, another is less, so the total sum remains constant. For a rope it means that a single rope's wave has potential energy in all its pieces not changing with time.
Therefore,
I = π/k = π·λ/(2π) = ½λ
Consequently, the potential energy of all tiny springs on a segment of the length λ will be
Uλ = ½ω²·μ·A²·I =
= ¼ω²·μ·A²·λ
Let's consider a kinetic energy of all tiny springs on a segment of the length λ with attached to them infinitesimal masses.
The general formula for kinetic energy is
K = ½M·V²,
where M is mass and V is speed of an object.
For a single tiny spring with an infinitesimal mass attached to it we have
M = μ·dx - product of linear mass density μ by the length of a piece of a rope attached to the top of a spring dx
V = ∂y(x,t)/∂t - the first derivative of vertical position of the mass attached to a spring by time
Since we know the expression for vertical movements of the top of a spring
y(x,t) = A·cos(ω·t−k·x),
where k = 2π/λ
we can find the speed of vertical movement at any moment of time:
∂y(x,t)/∂t = −ω·A·sin(ω·t−k·x)
The kinetic energy of a point-mass attached to this tiny spring is
K(x,t) = ½M·V² =
= ½μ·dx·ω²·A²·sin²(ω·t−k·x)
As you see, the expression for K(x,t) resembles the expression for U(x,t) with the only difference that this time we have sin²() instead of cos²().
When we integrate this expression by x from 0 to λ (that is, across all tiny springs that cover a distance equaled to a wavelength λ), we will have a similar result - the total kinetic energy of all point-masses attached to springs on a segment of the length λ does not depend on time t and equals to the same value
Kλ = ¼ω²·μ·A²·λ
It's quite remarkable that potential and kinetic energies of one wavelength of a rope are the same and independent of time.
Now we can calculate the combined energy carried by a single piece of a rope of the length equaled to a wavelength of oscillations:
Eλ = Uλ + Kλ = ½ω²·μ·A²·λ
The above amount of energy is carried by one wavelength of a oscillations. That takes an amount of time equaled to a period of oscillations τ. Therefore, the oscillations produce an average power
Pave = Eλ/τ = ½ω²·μ·A²·λ/τ
Since λ/τ = v (speed of wave propagation), we conclude
Pave = Eλ/τ = ½ω²·μ·A²·v
The following picture schematically represents a wave (red line) and the level of its kinetic energy (blue line), which is based on the shape of function sin²(ω·t−k·x)
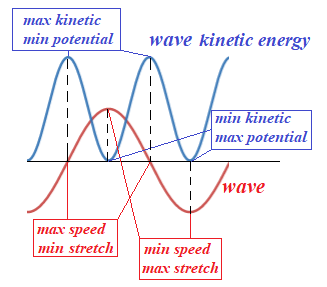
The potential energy graph is based on cos²(ω·t−k·x) and its graph would be similar, just shifted to be in anti-phase with kinetic energy.
Their sum is constant because sin²()+cos²()=1.

No comments:
Post a Comment