Notes to a video lecture on http://www.unizor.com
Relative Rotation
The subject of this topic is a rotation of an object around some axis,
while this axis, in turn, rotates around another fixed axis (we will
consider only a case when both axes, fixed and rotating, are parallel to
each other).
Before going any further, let's refresh our knowledge about concepts of angular speed, linear speed and linear velocity of a point-object rotating around an axis along a circular trajectory within a plane perpendicular to an axis of rotation.
If a point A rotates on a circular trajectory with a center O, radius OA is turning by certain angle φ during certain time t. If at time t=0 we mark the position of radius OA as the beginning of rotation, angle of rotation from the beginning position of radius OA to its position at time moment t can be considered as a function of time φ(t). The unit of measurement of an angle that we will use is radian, so a full circle is a rotation by 2π.
We can talk about average angular speed of rotation that we
define as average angle of rotation in a unit of time and can calculate
by dividing an increment of angle of rotation φ(t+Δt)−φ(t)=Δφ(t) divided by increment of time (t+Δt)−t=Δt.
We can also talk about instantaneous angular speed ω(t) at any moment of time t as a limit of the above ratio as Δt becomes infinitesimally small, which is a derivative of angle of rotation by time:
ω(t) = φ'(t)
For our purposes in most cases we will deal with rotations having a constant instantaneous angular speed, which we will call just angular speed, unless otherwise is explicitly indicated. In this case, if φ(0)=0 then φ(t)=ω·t.
Ret's put this rotation with constant angular speed into a system of coordinates with an origin at point O
- center of rotation, XY-plane coinciding with a circular trajectory
and X-axis coinciding with the radius to a point where the rotation
begins.
Obviously, Z-coordinate of a rotating point-object is always zero.
X- and Y-coordinates can be easily obtain using trigonometric functions:
x(t) = R·cos(φ(t)) = R·cos(ω·t)
y(t) = R·sin(φ(t)) = R·sin(ω·t)
If constant angular speed of rotation along a circular trajectory is ω and radius of this circular trajectory is R, the length of a circular trajectory covered by a rotating point during time from t to t+Δt, as known from Geometry, equals to
R·[φ(t+Δt)−φ(t)] = R·ω·Δt.
So, we can define the average linear speed of rotation along a circular trajectory during time interval from t to t+Δt as R·ω·Δt/Δt=R·ω.
As we see, it does not depend on time and is constant. Therefore, we will call it just linear speed of a point-object circulating with constant angular speed.
Linear velocity is a vector with magnitude equal to linear speed R·ω and directed always along a tangential line to a circle.
To prove it, let's approach this concept using XY-coordinates. As we know, velocity of a point-object is a vector with coordinates {x'(t),y'(t)}, where x(t) and y(t) are coordinates of a point-object as functions of time and x'(t) and y'(t) are the derivatives of coordinate functions.
Knowing the coordinate functions in case a point-object moves along a circular trajectory with constant angular speed, as expressed above, let's find the linear velocity during this rotation:
x'(t) = −R·ω·sin(ωt)
y'(t) = R·ω·cos(ωt)
Scalar product of this velocity vector and coordinate vector {x(t),y(t)} is
x(t)·x'(t)+y(t)·y'(t) =
= −R·cos(ωt)·R·ω·sin(ωt) +
+ R·sin(ωt)·R··ωcos(ωt) = 0
This proves that vectors {x(t),y(t)} (which is directed along a radius to a rotating point-object) and {x'(t),y'(t)} (velocity vector) are perpendicular and, therefore, velocity vector coincides with a tangential line to a circular trajectory.
As for magnitude of this velocity vector, it's equal to
v = √(x'(t))²+(y'(t))² =
=√R²ω²sin²(ωt)+R²ω²cos²(ωt)=
= Rω
That is, the magnitude of velocity vector equals the linear speed, which justifies the usage of term linear velocity to emphasize its vector nature and physical nature of magnitude reflecting the pace of the rotation.
Now let's move to problems of relative rotation.
Assume that we have an original inertial frame of reference with all actions occurring within XY-plane, so Z-coordinate is always zero.
A point O is a center of rotation for point A, that rotates within XY-plane with constant angular speed ωa around O along a fixed circle of radius R.
A point B rotates in the XY-plane with constant angular velocity ωb around point A along a circle of radius r.
Mechanics of this combined motion can be represented by this picture
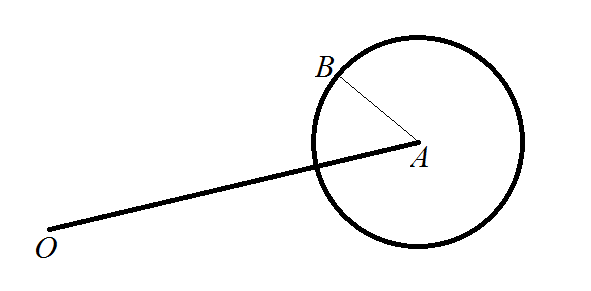
Here rod OA of the length R rotates around center O with angular speed ωa, while point A is a center of a disk of radius r spinning with angular speed ωb with point B positioned on the edge of this disk.
Our task is to analyze the motion of point B. In particular, we will analyze the linear speed of point B in the original inertial frame of reference, where point O is fixed.
We will use XY-coordinates and assume that at moment t=0 rod OA is positioned along the X-axis and point B is also on the X-axis to the right of point A, so initial angles of rotation of both, the rod and the disk, are zero.
At time moment t vector OA(t) in the original inertial frame of reference will turn around fixed point O by angle ωa·t, and the position of a center of a disk A will be
xa(t) = R·cos(ωa·t)
ya(t) = R·sin(ωa·t)
These coordinates represent vector OA(t).
During this time disk will turn by angle ωb·t, and vector AB(t), that has a magnitude r, will have the following coordinates in the frame of reference associated with point A and axes parallel to those of original inertial frame where point O is fixed:
xab(t) = r·cos(ωb·t)
yab(t) = r·sin(ωb·t)
These coordinates represent vector AB(t).
The sum of two vectors, position vector of point A in the original inertial frame, which is OA(t), and position vector of point B in the reference frame associated with a center of rotation A of the disk, which is AB(t), will be a position vector of point B in the original inertial frame, where point O is fixed.
OB(t) = OA(t) + AB(t)
Coordinates of this vector are:
xb(t) = xa(t) + xab(t)
yb(t) = ya(t) + yab(t)
or, using the values of coordinates calculated above,
xb(t) = R·cos(ωa·t) + r·cos(ωb·t)
yb(t) = R·sin(ωa·t) + r·sin(ωb·t)
Differentiating the above equations by time, we can find the velocity vector of point B in the original inertial frame of reference, where point O is fixed:
x'b(t) = −R·ωa·sin(ωa·t) −
− r·ωb·sin(ωb·t)
y'b(t) = R·ωa·cos(ωa·t) +
+ r·ωb·cos(ωb·t)
Ret's now determine the magnitude of this velocity vector, the linear speed of point B, as it goes along its trajectory.
vb = √(x'b(t))²+(y'b(t))² =
= √R²ωa²+r²ωb²+2Rrωaωbcos((ωb−ωa)t)

No comments:
Post a Comment