Notes to a video lecture on http://www.unizor.com
Conservation of Momentum
In the differential form relationship between vectors of momentum of motion and impulse of force causing this motion is
d[m·v(t)] = F(t)·dt
The same can be expressed in terms of derivative of momentum by time:
d[m·v(t)]
or, using different notation for derivative,
[m·v(t)]' = F(t)
Any of the above equations are equivalent to the Newton's Second Law.
A trivial consequence of these equations is that in case of absence of force (F(t)=0) the momentum's derivative is zero and, therefore, momentum remains constant.
If we have a system of objects with no external forces, any force,
acting from some object against another has equal in magnitude and
opposite in direction reaction force acting from the latter to the
former. Since the time of interaction is the same for action and
reaction, while forces are equal in magnitude and opposite in direction,
their vectors of impulses, if added, produce zero total impulse. Each
impulse produces a corresponding change in momentum of an object it's
applied against. These momentums will also be of the same magnitude and
opposite in direction. Consequently, the total momentum of the system
will not change.
We can conclude that in the absence of external forces the momentum of motion of a system of objects is constant.
This is the Law of Conservation of Momentum.
Example 1
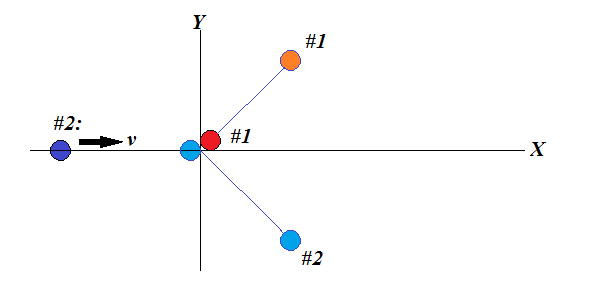
Consider a frame of reference fixed on a billiard table.
A ball #1 is positioned near the origin of coordinates in the middle of a table.
Another ball #2 of the same mass is positioned at some point on the X-axis on its negative side.
A player hits ball #2 towards the point where ball #1 is located, giving it a speed v.
After the contact the balls went each in its own direction. Ball #1 went at an acute positive angle α from the positive direction of the X-axis (that is, counterclockwise), while ball #2 went at an acute but negative angle −β from the positive direction of the X-axis (that is, clockwise).
What are the magnitudes of the speeds of the balls after contact (ignore the friction)?
Solution
Let's apply the Law of Conservation of Momentum.
Initially, the total momentum of the system was equal to the momentum of
ball #2 (as the only one having non-zero velocity), which is
As a vector, it has only X-component not equal to zero, since velocity of ball #2 is along the X-axis.
After the contact the balls have velocities v1 (for ball #1) and v2 (for ball #2) with unknown magnitudes, correspondingly, v1 and v2.
These velocities, as vectors, have both X- and Y-components:
v1x = v1·cos(α)
v1y = v1·sin(α)
v2x = v2·cos(−β) = v2·cos(β)
v2y = v2·sin(−β) = −v2·sin(β)
The sum of X-components of momentums of both balls after the contact
must be equal to X-component of the momentum of ball #2 before the
contact and the sum of Y-components of momentums of both balls after the
contact must be equal to Y-component of the momentum of ball #2 before
the contact. that gives us two equations with unknown:
m·v1·cos(α)+m·v2·cos(β) = m·v
m·v1·sin(α)−m·v2·sin(β) = 0
Reducing by m both equations, we have a simple system of two linear equations with two unknowns:
v1·cos(α) + v2·cos(β) = v
v1·sin(α) − v2·sin(β) = 0
Solutions for this system are:
v1 = v·sin(β)/sin(α+β)
v2 = v·sin(α)/sin(α+β)
Interesting particular case appears if α=0, that is when
the ball #2 hits the ball #1 heads-on. Then the speed of the ball #2
after the contact is zero, it stops at the place of contact and the ball
#1 takes on the full speed v, that the ball #2 used to have, and continues the motion in the same direction along the X-axis.
Example 2
Consider an inertial system of reference on a plane.
Object A moves along X-axis from the negative side of the X-axis in the positive direction towards the origin of coordinates.
Object B moves along Y-axis from the negative side of the Y-axis in the positive direction towards the origin of coordinates.
The mass of object B is 4 times greater than mass of object A, but the
speed of object A along X-axis is 3 times greater than speed of object B
along Y-axis.
At the origin of coordinates these two objects meet and attach to each
other, forming a new combined object AB. The magnitude of the speed of
the combined object AB is vAB.
What are the speeds of objects before their contact?
Solution
Let the unknown mass of object A be mA and its speed along the X-axis be vA.
Let the unknown mass of object B be mB and its speed along the Y-axis be vB.
We will deal with scalar speeds because the direction of the velocities
is along the coordinate axes and, therefore, Y-component of the velocity
of object A is zero, as well as X-component of the velocity of object
B.
The vector of momentum of object A before contact is directed along the positive direction of the X-axis and its magnitude is
PAx = mA·vA
The Y-component of the momentum of object A is zero:
PAy = 0
For object B the momentum before the contact is directed along the positive direction of the Y-axis and its magnitude is
PBy = mB·vB
The X-component of the momentum of object B is zero:
PBx = 0
After the contact and attachment the momentum of the combined object AB is equal by magnitude (with unknown direction) to
PAB = (mA+mB)·vAB
While we do not know the direction of the velocity of the combined
object AB, we can evaluate the X- and Y-components of its momentum as
sums of corresponding X- and Y-components of momentums of objects A and
B.
From the Law of Conservation of Momentum follows
PAx+PBx = PABx
PAy+PBy = PABy
Therefore,
PABx = mA·vA
PABy = mB·vB
From these two orthogonal components we can derive the magnitude of the momentum vector of combined object AB:
|PAB| = √[mA·vA]² + [mB·vB]²
On the other hand, the mass of combined object AB is a sum of masses of
objects A and B. Also, the magnitude of a speed of combined object vAB is given.
Therefore,
(mA+mB)·vAB =
= √[mA·vA]² + [mB·vB]²
We know that
mB = 4·mA
vA = 3·vB
Substituting these proportions to the equation above for the momentum of combined object AB, we obtain
(mA+4·mA)·vAB =
= √[mA·3·vB]² + [4·mA·vB]² =
= 5·mA·vB
Reducing both sides of the equation by 5·mA, we obtain the value of speed of object B:
vB = vAB
Now we can determine speed of object A:
vA = 3·vB = 3·vAB

No comments:
Post a Comment